
面向多类型目标的多无人机协同搜索(通讯)
面向多类型目标的多无人机协同搜索(通讯)
吴青坡, 周绍磊, 刘 伟, 尹高扬
(海军航空工程学院控制工程系,山东烟台264001)
摘要:搜索环境的复杂化使得多无人机( UAV)协同搜索需要面对各种类型的目标。针对各类型目标的运动特征,采用目标存在概率密度相关的搜索图方法,在考虑协同搜索问题特性基础上,建立合理的目标收益函数。采用集中式与分布式相结合的集散式控制框架,结合对搜索图的探测更新,通过预测控制及改进匈牙利算法进行多UAV的协同搜索决策。所用决策方法可在提高搜索效率的同时,有效避免多UAV间可能发生碰撞的问题。最后,通过与传统搜索方法进行仿真对比分析,验证了所提方法的有效性。
关键词:多无人机;协同搜索;Z字形搜索;时敏目标
中图分类号:TP242 文章编号:1671 - 637X( 2016) 04 - 0028 - 05
0 引言
随着无人系统的快速发展和广泛应用,无人系统已经从传统的情报、监视与侦察任务扩大到通信中继、反地/水雷战、反潜战、电子战等军事领域,但从各国无人系统发展思路来看,无人系统执行情报、监视与侦察任务仍然是当前和近期无人系统的基本使命。随着战场环境的复杂化,单靠一架UAV很难保证搜索任务完成的质量,多UAV执行协同搜索任务已成为目前国内外学者研究的热点。
采用凸多边形分割、质心Voronoi图划分,模糊c均值聚类等方法将目标区域分割为与
无人机等数量的子区域,将多UAV协同搜索问题转换为单UAV搜索和监视问题,降低了任务难度。基于各类型搜索图,对目标函数进行优化求解,采用预测控制等方法引导UAV在目标区域内进行搜索;在考虑UAV动态约束情况下,研究了目标区域连续监视问题,并进行相关试验;基于传统扫描式搜索方法,采用横队垂线搜索和横队斜线搜索算法对目标区域运动目标进行覆盖搜索。
从目前的研究成果来看,对多UAV协同搜索问题的研究主要针对静止目标或运动目标,协同搜索控制结构主要是集中式或分布式,在避碰方面主要假定各UAV不在同一飞行平面或者利用威胁度系数结合人工势场等方法来完成避碰,而且很少有分析UAV数量变化对协同搜索算法性能的影响。本文考虑搜索区域内目标的多样性以及先验情报信息误差等因素,在集散式控制结构下进行多UAV的在线协同搜索决策,既提高了多UAV协同搜索的效率,又可有效避免各UAV执行搜索任务期间碰撞情况的发生。
1 问题描述
假定对特定任务区域Q![]() R2进行搜索,区域内既包含湖泊等目标存在的可能性较小的非重点区域,也包含道路等重点区域。目标类型有静止目标、运动目标及时间敏感目标,时敏目标主要指其大概位置已由先验信息得知,而何时出现却未知的目标,可能是静态(隐藏的雷达站等),也可能是动态(如躲在树林深处或山洞内的车辆,建筑物内的人员等)。
R2进行搜索,区域内既包含湖泊等目标存在的可能性较小的非重点区域,也包含道路等重点区域。目标类型有静止目标、运动目标及时间敏感目标,时敏目标主要指其大概位置已由先验信息得知,而何时出现却未知的目标,可能是静态(隐藏的雷达站等),也可能是动态(如躲在树林深处或山洞内的车辆,建筑物内的人员等)。
假定在任务区域内存在N个静止目标,N m个运动目标,N s个时间敏感目标,使用N v架UAV利用机载传感器对区域进行协同搜索。无人机与地面指挥控制中心有一定的信息交互能力,多UAV协同搜索的主要任务就是要找寻一种方法,使多UAV编队在最短的时间内以最小的代价发现尽可能多的各类型目标。
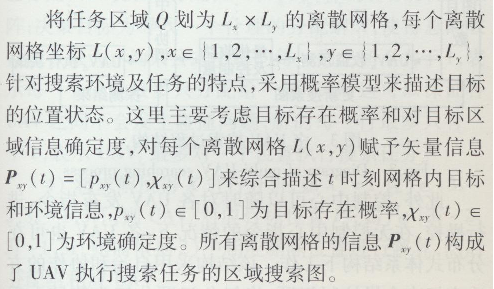
1.1搜索环境模型
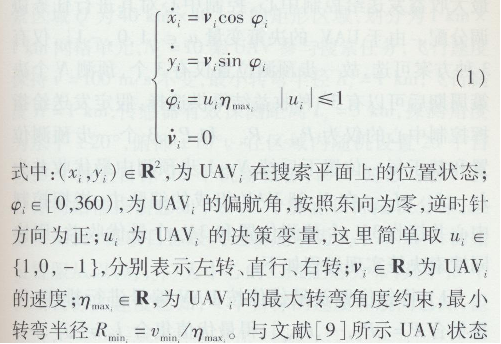
1.2 UAV平台模型
假定所有UAV在同一高度H以固定速度飞行,这里研究重点是协同侦察与监视过程中的多UAV协作策略和优化算法,而非平台底层飞行控制,假定UAV均装有自主飞行控制系统,且可视为受一定运动约束的质点。其中,第i架UAV动态特性为
 模型不同,这里无人机模型并不按栅格移动,其探测位置区域也与无人机位置有所差别。
模型不同,这里无人机模型并不按栅格移动,其探测位置区域也与无人机位置有所差别。
1.3传感器探测模型
传感器探测范围由UAV的飞行状态、传感器安装
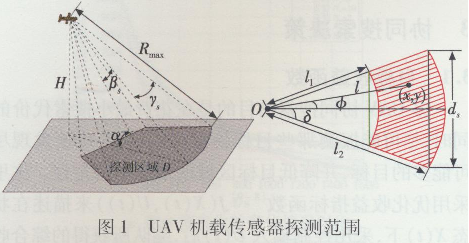
UAV以固定高度水平飞行,忽略滚转角影响,其机载传感器地面探测范围最大宽度可表示为
 器的安装及飞行高度相关。这里不考虑传感器虚警的情况,认为目标进入探测范围即可100%被检测到。
器的安装及飞行高度相关。这里不考虑传感器虚警的情况,认为目标进入探测范围即可100%被检测到。
2搜索图建模
![]() 息确定,公路等目标可能存在和活动的重点区域初始设置较高的目标存在概率,湖泊等非重点区域则赋值较小的目标存在概率。
息确定,公路等目标可能存在和活动的重点区域初始设置较高的目标存在概率,湖泊等非重点区域则赋值较小的目标存在概率。
依据预先获得的目标初始位置、速度、运动方向等情报数据信息的情况,可将运动目标的位置散布模型分为4种类型:1)目标初始位置未知;2)目标初始位置范围已知,速度未知;3)目标大概初始位置和运动速度大小已知,运动方向未知;4)目标初始位置、运动速度和运动方向均为已知,但有误差存在。具体目标概率分布赋值情况。
对于时敏目标,认为由先验信息可获取其大概存在位置,但具体出现时间未知,如躲在建筑物内的恐怖分子,洞库里的车辆,隐藏未开机的雷达等。假定所得

依据各类型目标的位置状态信息模型及环境确定度,完成对搜索图的初始化。目标存在概率和确定度的更新方程参阅,此处不再赘述。
3 协同搜索决策
3.1 目标收益函数
多UAV协同搜索的目的是在花费最小搜索代价的同时,尽可能探测那些目标价值高的区域,以便发现尽可能多的目标,并降低目标区域的信息不确定性。这里采用优化收益指标函数,J(X(t),U(t))来描述在状态X(t)下,采用控制输入U(t)后,编队所获得的综合收益。它是一个综合考虑了多UAV在搜索过程中的目标

3.2 UAV搜索决策过程
UAV依据搜索任务环境的变化,在线调整任务与航迹,建立如图2所示的UAV搜索决策过程模型。
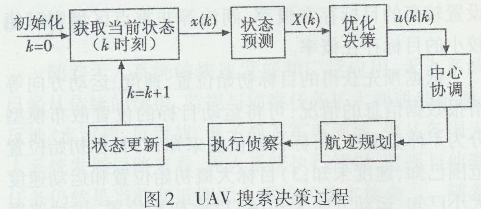
首先,在每个离散决策时刻k,UAV基于当前状态和系统模型,预测未来N个阶段的状态,通过使目标收益函数最优来寻出最优控制序列;然后各UAV将自身最优决策结果发送给控制中心(地面站或选取领队UAV),控制中心进行协调规划后,将优化后结果返回;最后,UAV依照接收到的决策结果,执行侦察任务,并进行状态更新。随着搜索任务的进行,整个决策过程采用滚动时域的方式不断进行迭代决策,直至搜索任务结束。
3.3协同决策体系结构
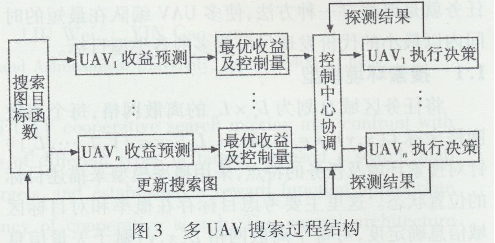
动态变化的环境使得多UAV协同搜索问题变为一个在线的动态优化问题,要求多UAV必须能够根据外部环境的变化,在线自主调整其任务和航迹,协同完成目标区域内的搜索任务。多UAV协同搜索过程结构如图3所示。每架UAV在执行任务过程中,从自身收益出发,依环境信息和自身状态对当前的状态进行预测,如果结合目标函数发现更有利于自身的决策,则把决策结果(最优收益及控制量)提交给控制中心,由控制中心对每架UAV的规划结果进行整体协调,从而获得更好的整体协同效能。各UAV按控制中心决策执行搜索任务,将探测结果发送至控制中心,控制中心依此对搜索图进行更新,各UAV从控制中心读取更新结果,并进入下一次决策过程。
此外,控制中心可以随时对各UAV发布指令,进行操控,在无控制中心指令的情况下,各UAV也可在分布式体系结构下工作。该结构采用自治和协作的方法来解决全局控制问题,将复杂问题分解为能够由系统中各个节点解决的子问题,最后由中央节点进行协调决策。
3.4控制中心搜索协调
各UAV依自身状态预测未来N个决策周期内可能达到的位置及探测范围,将一步预测位置及各相应最大收益发送给控制中心,控制中心对其进行任务协
4仿真分析
为验证本文所提搜索方法的正确性和优越性,对比贪婪算法和横队Z字形搜索方法进行仿真分析。搜索区域Q为40 km x40 km的矩形区域,划分为1 km×1km网格单元,N=10架UAV参与搜索任务,飞行速度保持V= 100 m/s不变,最小转弯半径Rs=1km,飞行高度H=1km,传感器有效探测距离L=3 km,探测角度为水平±200,俯仰±100。在区域内随机设置25个目标:5个静止目标,10个机动目标,10个时敏目标。各目标初始情报信息如下:1)5个静止目标随机分布,位置未知;2)机动目标最大运动速度为v t=25 m/s,初始位置服从以(x0,y0)为中心的二维正态分布,其中,3个机动目标的速度已知,4个目标的速度和航向已知,但有误差;3)10个时敏目标存在位置与机动日标相同,出现时间随机,其中,5个目标静止,5个目标在出现后开始运动,速度大小及方向未知。
为了避免这种随机性的影响,本文进行了200次仿真,每次仿真运行1500 s,UAV决策时间间隔100,通过仿真将本文方法与贪婪算法及横队Z字形方法比较,所得结果如图4和图5所示。
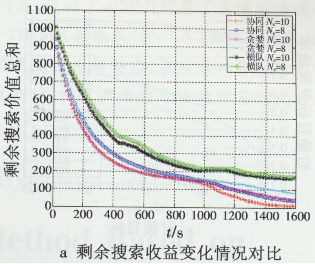
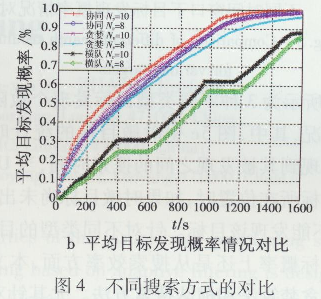
图4a显示依据区域搜索图得到剩余搜索收益变化情况的对比结果,随着UAV数量的减少,虽然系统搜索效能有所下降,但本文方法均优于贪婪算法和横队搜索方法。图4b所示为平均目标发现概率随搜索时间变化的关系,横队搜索中之所以有段平坦阶段主要是由UAV编队转弯期间搜索区域范围较少所致。基于本文方法和贪婪算法搜索效率明显高于横队搜索方法,本文方法搜索效果优于贪婪算法,且随着无人机数量的减少,搜索性能下降速度明显小于贪婪算法和横队搜索方法。
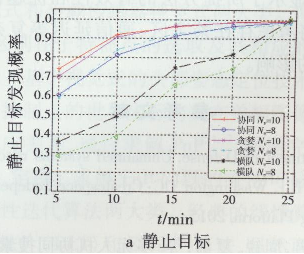
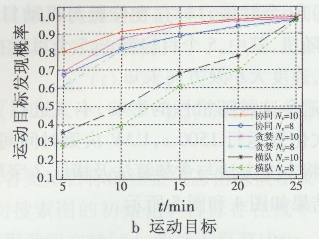
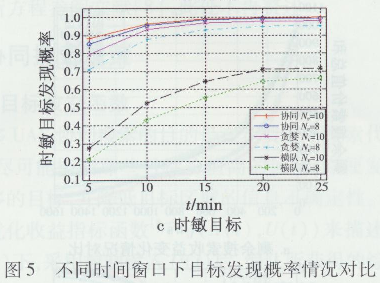
图5所示为3种不同类型目标发现个数随搜索时间变化情况,其中,图5c中时敏目标的统计时间为时敏目标出现到其被发现之间的搜索时间,当UAV搜索到时敏目标所在位置时,如果时敏目标尚未出现,则认为UAV不能发现该目标。针对不同类型的目标,不论从发现目标概率上还是从搜索效率方面,本文搜索方法均优于贪婪算法和横队搜索方法。尤其针对时敏目标,UAV数量减少对本文方法的搜索性能影响明显小于贪婪和横队搜索方法。
5 结论及展望
本文针对多UAV协同搜索过程中可能面对的多种类型目标,采用目标概率相关的搜索图方法,在集散式控制框架下,通过预测控制及匈牙利算法进行多UAV的协同搜索决策。所用方法在提高搜索效率的同时,还可有效避免多UAV间可能发生碰撞的问题。通过与贪婪算法及传统横队Z字形搜索方法进行仿真对比分析,显示了所提方法的有效性和优越性。下一步的工作将考虑存在禁飞区、通信延迟等复杂情况对系统决策的影响。